Digital Signal Conditioners Explained
Filters for Load Cell Applications
Almost every load cell application requires some form of filtering to reject noise on the measuring signal. Some of this noise come from the electronic circuit itself but it can also be picked up from the surroundings e.g. 50/60Hz hum from power lines, motors, etc. Mechanically introduced noise is also a very important part of the total noise for load cell applications because a sensitive scale will also be very sensitive to all kinds of vibrations. The basic idea of a filter can be illustrated as shown below.

Ideally all noise will be removed by the filter leaving only the wanted signal on the output. In real life however the design of a filter is always a trade off between several factors. For load cell applications the most important trade off is between noise suppression and response time. Filters can be grouped into two main categories, analog and digital. Even through the goal is the same these two kinds of filters are made in very different ways.
Analog Filters
Analog filters are electronic circuits build with components such as resistors, capacitors and op-amps. Such filters are part of nearly all devices performing some kind of analog signal processing. e.g. audio and video equipment, industrial and medical instruments and many other applications. In analog filters the filtered value is represented by a current or a voltage which is directly proportional to the physical property it represents e.g. a sound or a weight on a load cell.
Digital Filters
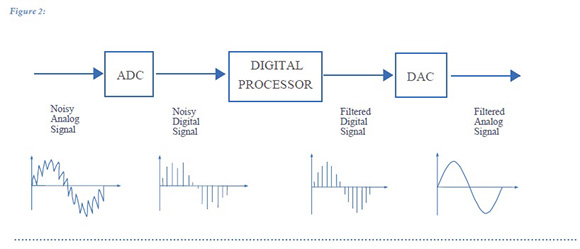
Digital filters use a completely different approach where the signal is represented by a sequence of numbers rather than a voltage or current. The analog signal must first be digitized into discrete samples by an ADC (Analog to Digital Converter) at a sufficiently high rate compared to the frequencies present in the input signal. These digital samples will then be feed into some algorithms in a computer, micro controller or digital signal processor (DSP). DSP’s and some micro controllers have dedicated hardware for this kind of calculations which normally involve multiplying the input values by constants and adding the products together. The filtered result can then be used directly in digital form or if necessary converted back to an analog signal using a DAC (Digital to Analog Converter). The block diagram below shows such a system.
Advantages of Digital Filters
The main advantages of digital over analog filters are summarized in the following list.
- Digital filters are much more versatile than the analog ones. A digital filter can closely emulate any of the well known analog filter functions but it is also possible to design completely other filter types with no analog equivalents. On top of that the design of adaptive filters is also possible. Such filters can change their characteristics depending on the input signal.
- A digital filter is basically a piece of software and can therefore be updated or changed to fit various modes of operation or variants of the final product. An analog filter is a physical piece of hardware and can only be adjusted within the limits it originally was designed for.
- If it is necessary to handle very low frequencies it can lead to impractical component values in analog filters. Digital filters don’t have any problems with that.
- Analog filters, especially the more complex ones, will be very sensitive to component tolerances, temperature drift and drift with time. To avoid this, the use of expensive precision components and factory trimming is often necessary. Digital filter characteristics are defined by a number of coefficients and are therefore extremely tolerant to temperature change, time and production tolerances.
- Digital filters can easily be designed and simulated on computers without the uncertainties involved in analog circuit simulation.
Digital Filter Types
Digital filters are usually grouped into two main categories, IIR filters also known as recursive filters and FIR filters also known as non-recursive filters. The term IIR is an abbreviation for Infinite Impulse Response and the term FIR is an abbreviation for Finite Impulse Response. The impulse response of a digital filter is the output sequence from the filter when a unit impulse is applied to its input. A unit impulse is a value of one as the very first sample with all subsequent samples set to zero.
FIR Filters
The output of this type of filters is calculated solely from the current and previous input values (Xn, Xn-1, Xn-2, ….) The input values will typically be shifted into a register stack where the oldest value will be shifted out and discarded every time a new value is shifted in. For each cycle all register values are multiplied with a constant (Cn, Cn-1, Cn-2,….) and the products are added to an accumulator representing the output of the filter. This architecture result in the Finite Impulse Response. When the first and only value of one is shifted all the way through the filter no trace of it will be left inside the filter and the output will be zero. In other words after a finite known number of filter cycles the output will stabilize at a known value. This type of filter is said to be non-recursive because no output values are feed back into the filter. The characteristics of such a filter is defined by the number of stored values inside the filter – also called taps and the constant values used in the multiply-accumulate operations. Note: A simple average calculation can be seen as a special case of a FIR filter where all the constants have the same value (1 / number of taps)
IIR Filters
The output of this type of filters is calculated both from the current and previous input values (Xn, Xn-1, Xn-2, ….) and the previous output values (Yn-1, Yn-2, …..) Therefore the name recursive filter (recurring = appearing again) because previous values are feed back into the filter algorithm. IIR filters are more tricky to design than FIR filters and they involve more complicated runtime calculations but for a given filter characteristic the total load on the digital processor will often be lower for an IIR filter compared to an equivalent FIR filter. The name Infinite Impulse Response filter have its origin in the fact that the impulse will in theory never die out because a smaller and smaller part of it will be feed back into the filter but never vanish completely. In practice however the output will go to zero within a finite time when the remaining values become smaller than the available digital resolution but it is not so easy to predict as in the FIR case.